
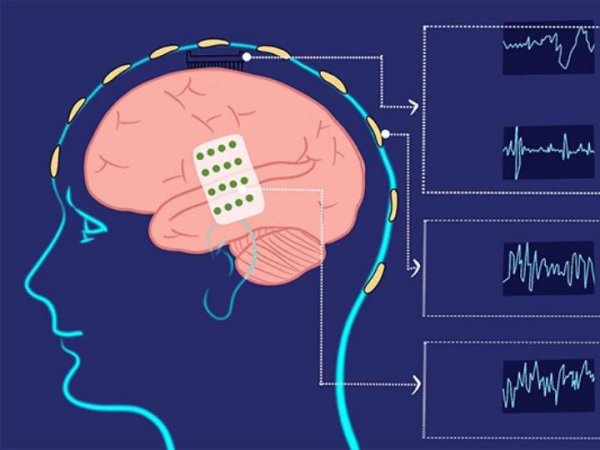
脑机接口(Brain-Computer Interface,BCI),又称脑机交互,是指在生物(人或动物)大脑与外部设备或环境之间建立起一种新型的实时通讯与控制系统,从而实现脑与外部设备直接交互的技术,是一种可以让用户通过思想来控制特殊计算机设备的通信方式。脑机接口的工作原理是通过信号采集设备从大脑皮质采集脑电信号,经过放大、滤波、转化等处理过程,转化为可以被计算机识别的信号,然后对信号进行预处理,提取特征信号,再利用这些特征信号进行模式识别,最后转化为控制外部设备的具体指令,实现对外部设备的控制。
脑机接口技术概述
编辑脑机接口(Brain-Computer Interface,BCI),又称脑机交互,是指在生物(人或动物)大脑与外部设备或环境之间建立起一种新型的实时通讯与控制的系统,从而实现脑与外部设备直接交互的技术,是一种可以让用户通过思想来控制特殊计算机设备的通信方式。脑机接口技术结合了神经生理学、计算机科学和工程学的方法、进路和概念,致力于在生物大脑和机器装置之间建立实时双向联系。这里的“脑”意指有机生命形式的大脑或神经系统,“机”主要指可感知、计算及执行的外部设备。脑机接口技术通过双向信息传输通道连接大脑和机器,机器端通过记录和解码大脑信号来感知生物端的意图和状态,生物端通过接受机器端的编码刺激来获得命令和反馈。

发展历程
编辑科学幻想阶段
1857年,英国生理学家卡通(Caton)在兔脑和猴脑上记录到了脑电活动,并发表了《脑灰质电现象的研究》论文。1872年,贝克(Beck)再一次发表关于脑电波的论文,掀起了研究脑电现象的热潮。1924年,德国精神病学家汉斯·贝格尔(Hans Berger)发现了脑电波,脑机接口研究由此出现。1963年,英国拜登神经病学研究所医生格雷·沃特(Grey Walter)把病人的电极连接到了自己发明的“电位转换器”上,当病人看幻灯片,每次有换片的想法时,大脑运动皮层的电位就会升高,电位转换器就把这一信号传递给幻灯机,实现了自动换片,这是第一次成功的脑机接口实验。
科学论证阶段
20世纪90年代,以杜克大学的尼科莱利斯为首的科学家提出了从脑信号经由解码计算机到实体或虚拟的外部设备操控,然后从外部设备产生回馈信号输送回大脑的新型闭环脑机接口架构,标志着脑机接口技术的真正成型。1999年,美国NIH在纽约召开首届脑机接口技术的国际会议,此次会议回顾了脑机接口技术的研究历程及现状,定义了脑机接口的研究和应用的基本目的,明确和强调了关键技术问题,考虑了研究规程和评估方法标准,此会议的召开标志着脑机接口领域的全面起步。
2008年,尼科莱利斯实验室根据猴子的信号驱动了远在日本的一台名叫“计算的脑”的机器人稳步行走,首次实现了用意念控制机器人的行为动作。除了尼科莱利斯实验室之外,美国布朗大学的多诺霍、匹兹堡大学的施瓦茨和加州理工学院的安德森等科学家也开展了这方面的研究,通过记录十来个神经元的活动就能实现控制机器手。其中,匹兹堡大学神经生物学家利用脑机接口技术使猴子用操纵机械臂给自己喂食——这标志着脑机接口技术的发展已经容许人们将动物脑与外部设备直接相连。2012年,美国西北大学实现了功能性电刺激控制瘫痪肌肉。同年,美国匹兹堡大学实现人脑ECoG信号控制机械手,该大学研发的一款机械手,使得一位高截瘫患者在与美国总统奥巴马握手时,能够通过其大脑收到机械手回传来的信号,使患者感到两手相握的触感。2015年,加州理工大学的研究团、荷兰乌特勒支大学的科研团队通过读取病人脑区的神经活动信号协同脑机交互技术,使高位截瘫病人通过意念控制独立的机械手臂完成诸如喝水等较为精细的任务,并实现了其通过意念在计算机上打字,准确率达到95%,使脑机接口技术应用水平得到进一步发展。
技术爆发阶段
2016年,美国约翰·霍普金斯医学院发表论文,介绍他们建立了基于大脑皮层脑电信号控制的机械手指。这种在皮层表面放上电极的方式与植入皮层电极的方式相比较,避免了植入电极对皮层神经元的直接损伤。同年9月,斯坦福大学利用脑机接口技术让一只猴子在一分钟内敲打出莎士比亚的经典台词“To be or not to be,That is a question”。2018年2月,斯坦福大学发表论文宜布,他们可以让瘫痪患者通过简单想象就能精准控制电脑屏幕上的光标,其中一名患者可以在一分钟之内大约输入八个英文单词。
2019年7月,Neuralink公司的脑机接口技术取得了突破性进展,其研发的植入技术对被试脑损伤更小,传输数据更多。2020年5月,Neuralink公司研究的脑机接口排异概率更小、更安全,在原则上可修复任何大脑问题。除Neuralink公司,还有不少公司或团队在研发BCI对增强人脑机能的可能性。2021年,《自然》杂志上的一篇研究报告中指出,神经科学家将两颗4x4毫米大小的陈列放置在一位因脊髓损伤而瘫痪的65岁男子大脑运动皮层的外层,通过100多个细如发丝的电极,与大脑神经相连,记录并处理与书写相关的大脑活动,成功实现将手写信号实时翻译成文本,使打字速度实现跃升,为每分钟90个字符。
工作原理
编辑脑机接口的工作原理是通过信号采集设备从大脑皮质采集脑电信号,经过放大、滤波、转化等处理过程,转化为可以被计算机识别的信号,然后对信号进行预处理,提取特征信号,再利用这些特征信号进行模式识别,最后转化为控制外部设备的具体指令,实现对外部设备的控制。通常来说,一个完整的脑机接口系统,主要包括信号采集、信号处理、控制设备、反馈环节四个部分。
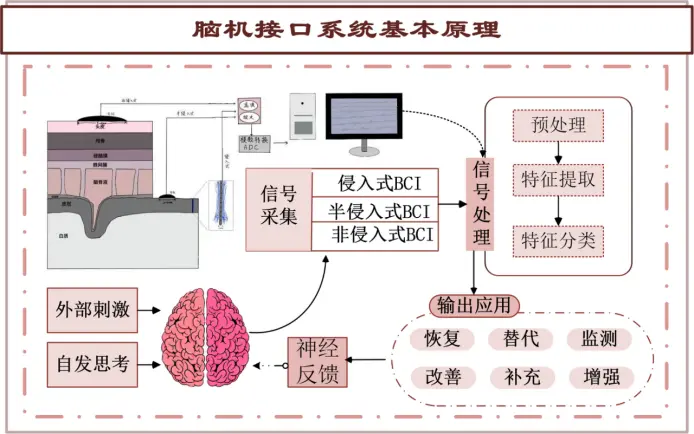
脑机接口工作原理
信号采集
信号采集是通过硬件设备来采集受试者的脑电信号,并进行记录。采样硬件在一定程度上决定了所获取脑电信号的质量及最终的脑机接口控制效果。脑电信号的获取主要有两种方式,一种通过将电极直接接触头皮表面获取脑电信号,另一种通过将电极植入大脑皮层内获取脑电信号。一个成功采集到的脑电信号应该具有可测量、可区分、稳定可靠、可重复等几个特点。
信号处理
信号处理是对收集到的信号进行分析处理。由于脑电信号在采集过程中会受到诸多因素的干扰,所以需要通过处理环节对信号进行解码和再编码来排除这些干扰因素。
控制设备
控制设备是将信号解码后再编码,主要是为了让控制设备按照大脑的意志自如行动。
反馈环节
反馈环节是将从环境中获得的信息反馈给大脑,这也是脑机接口系统的最后一个环节。反馈环节非常复杂,人能够通过视觉、触觉、嗅觉感知环境的变化,并将这些信息传递给大脑并进行反馈。
基本分类
编辑按侵入方式分类
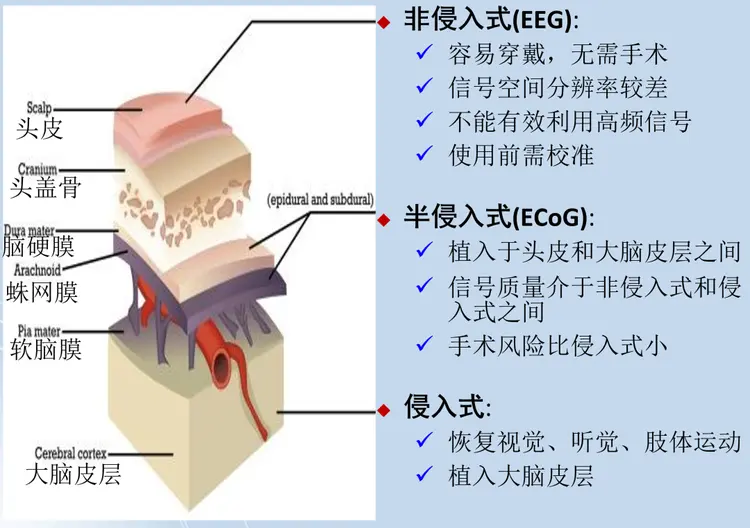
从侵入性这方面来划分,脑机接口技术可以分为非侵入式、侵入式和半侵入式三种。
按侵入方式脑机接口分类图
非侵入式
非侵入式脑机接口大多是基于脑电图(EEG)与脑磁图(MEG),利用附着在头皮上的智能设备对大脑信息进行解读,不需要侵入大脑。非侵入式脑机接口成本和风险都比较低,但由于人脑颅骨会减弱大脑信号、分散神经元电磁波,所以并不容易记录到高分辨率的信号,也很难确定发出信号的具体脑区和单个神经元。非侵入式脑机接口更多地应用于教育、娱乐与智能家居等方面。
百科词条作者:小小编,如若转载,请注明出处:https://glopedia.cn/59192/